영상
영상[대전=뉴스핌] 김태진 기자 = 한국기계연구원은 다양한 형태와 강도의 물체를 잡을 수 있는 만능 그리퍼(Gripper) 기술을 개발했다고 15일 밝혔다.
그리퍼는 로봇에 있어 사람의 손과 같은 역할을 하는 부분으로 물체를 쥐거나 놓으며 다룰 수 있도록 하는 장치다.
만능 그리퍼를 활용하면 하나의 그리퍼로 드라이버, 전구, 커피포트와 같이 다양한 물체를 다룰 수 있다.
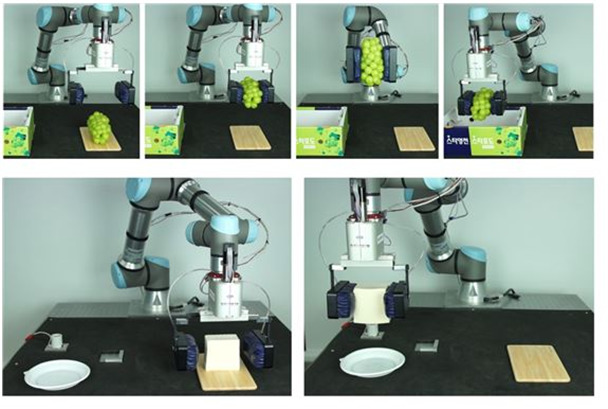
두부, 딸기, 생닭 같은 표면이 연한 식재료까지 손상 없이 집을 수 있어 가사, 요리부터 서빙, 포장, 생산 등 언택트(Untact) 서비스 분야에서 로봇의 적용범위를 혁신적으로 넓힐 수 있을 것으로 기대된다.
만능 그리퍼를 개발한 주인공은 기계연 첨단생산장비연구부 로봇메카트로닉스연구실 박찬훈 실장 연구팀.
만능 그리퍼는 집게형과 흡입형 두 종류며 모두 다양한 물체를 집어 들 수 있을 뿐 아니라 접촉 표면도 부드럽고 푹신하게 처리하여 서비스를 받는 고객의 안전성을 충분히 확보한 것이 특징이다.
집게형 그리퍼는 다양한 형상, 다양한 크기, 다양한 강도의 물체를 집게형으로 잡기 좋게 만들어졌다. 물체와 닿는 부분(표면)이 두부와 비슷할 정도로 부드럽고 푹신한데 물체를 잡을 때는 표면 형상이 대상체와 완벽히 일치하도록 변형된다.
물체를 잡은 이후에는 그리퍼 표면이 변형된 상태로 단단하게 변해 해당 물체가 변형된 홈에 확실히 끼인 상태가 돼 견고하게 파지할 수 있다. 이 특징 때문에 작은 압축력으로 파지가 가능해 손상되기 쉬운 물체도 안전하게 잡을 수 있다.
그리퍼 표면구조를 개발한 송성혁 선임연구원은 "대상체와 완벽히 일치하는 모양으로 변형되고 필요에 따라 강도가 제어되는 소프트 구조 기술이 핵심"이라고 설명했다.

흡입형 그리퍼는 좁은 공간에 놓인 다양한 형상, 다양한 크기의 물체를 효과적으로 들어 올리기 좋다. 마치 코끼리가 물건을 잡을 때 코끝의 모양을 물건의 형상에 맞추어 변형시키듯 흡입형 그리퍼도 말단부의 형상을 변형시켜 표면 굴곡이 심해 기존 흡입식 그리퍼로는 잡기 어려운 물체도 효과적으로 잡을 수 있다.
연구팀은 그리퍼 말단부에 벌집 형태의 소프트 구조를 구현했는데 이는 물체와 닿으면 복잡한 굴곡의 표면을 완벽하게 감싸고 강한 흡입력을 구현할 수 있다.
박찬훈 로봇메카트로닉스연구실장은 "기존의 그리퍼는 형태가 정해져있어 몇 가지 물체만 다룰 수 있지만 만능 그리퍼는 물체의 형상에 맞춰 그리퍼 표면을 변형시켜 대부분 물체를 다룰 수 있도록 하자는 새로운 접근으로 탄생한 기술"이라며 "적용 분야별로 로봇의 역할이 너무나 다양해 그리퍼 기술의 혁신이 필요했던 언택트 서비스 분야를 발전시키는 데 큰 역할을 할 것으로 기대한다"고 말했다.
이번 연구는 연구원 주요사업 '인간-로봇 공존 생산환경을 위한 인간 친화형 로봇 기술 개발' 과제의 일환으로 수행됐다.
memory4444444@newspim.com