영상
영상
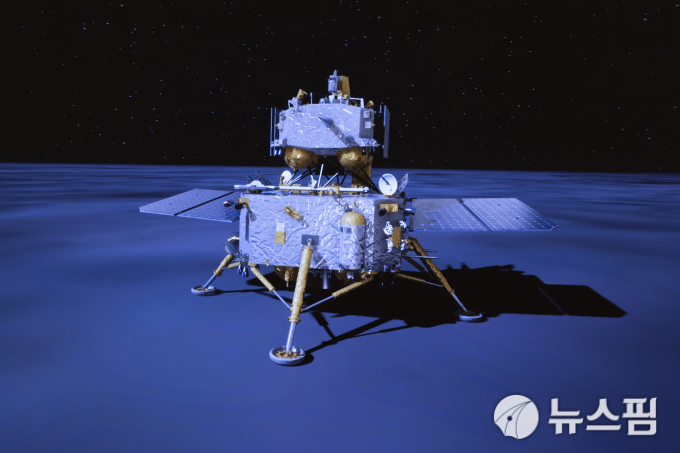
[베이징=뉴스핌] 조용성 특파원 = 2일 오전 세계 최초로 달 뒷면 착륙에 성공한 중국의 달 탐사선 '창어(嫦娥) 6호'가 조만간 달 뒷면 토양 시료 채취작업에 나선다. 시료를 채취하고, 지구로 귀환하는데까지 성공한다면 이는 인류의 역사적인 '대성과'로 기록될 것이라는 점에서, 중국내에서는 비상한 관심이 쏠리고 있다.
3일 중국 제일재경신문에 따르면 창어6호는 태양 날개와 안테나 전개 작업을 마치고 여러 점검절차를 끝낸 후, 2일 동안 '찬궁와바오(蟾宫挖寶)'이라고 이름 붙여진 달 뒷면 토양 샘플 채취 임무를 진행할 예정인 것으로 나타났다. '찬궁와바오'는 '두꺼비집에서 보물찾기'라는 뜻이다.
창어6호는 궤도선-귀환선 조합체와 착륙선-상승선 조합체로 이뤄져 있으며, 2일 착륙선-상승선 조합체가 분리된 후, 달 뒷면용 통신 중계 위성인 '췌차오(鵲橋·오작교) 2호'의 통신 지원을 받으면서, 달 뒷면에 착륙하는 데 성공했다. 이어 창어6호는 달 뒷면에서 달 토양 시료 2kg를 채굴해 지구로 복귀할 예정이다. 지구 복귀 시점은 오는 25일로 예정돼 있다.
창어6호는 시추와 표면수집 등 두가지 공정을 통해 달 토양 시료를 확보한다. 시추를 위해 창어6호는 드릴 장비를 장착하고 있다. 특수합금으로 만들어진 드릴은 3단체로 이뤄져 있으며, 깊이 2.5m까지 시추할 수 있다. 샘플링된 시료는 드릴의 밀봉 장치에 보관된다.
또한 표면수집을 위해 창어6호는 로봇 팔을 장착하고 있다. 로봇 팔의 길이는 3.7m에 달하며, 월면 샘플링은 120도 각도 범위에서 이뤄진다. 로봇 팔은 굴착, 삽질, 그립의 세가지 기능을 갖추고 있다. 채취된 샘플은 로봇팔 밀봉장치에 보관된다.
창어6호는 지난 5월3일 발사되어 예정된 궤도에 안착했으며, 지구-달 전이, 달 근접 제동, 달 순환 비행 등의 핵심 작업을 성공적으로 마쳤으며, 발사 약 1개월만에 달 뒷면 착륙에 성공했다. 달 뒷면 시료를 채취해 지국에 귀환한다면 이는 전 인류적으로 역사적인 성과로 평가될 전망이다.

한편, 중국은 2004년부터 달 탐사 프로젝트 '창어'를 시작했고, 2007년 무인 우주탐사선 창어 1호를 쏘아 올린 뒤 2013년에는 창어 3호를 달 앞면에 착륙시키는 데 성공했다.
이어 창어 4호는 2018년 12월 발사돼 2019년 1월 달 뒷면에 인류 최초로 착륙했다. 2020년 발사된 창어 5호는 약 2㎏의 달 앞면 샘플을 채취해 귀환했다.
중국은 2030년까지 유인 우주선을 달에 보내는 것을 목표로 하고 있다.
ys1744@newspim.com